- 关键字搜索
- 案例库首页
- > 案例No.0014 使用单轴机器人的中载传送组件

案例No.0014
案例名称: 使用单轴机器人的中载传送组件

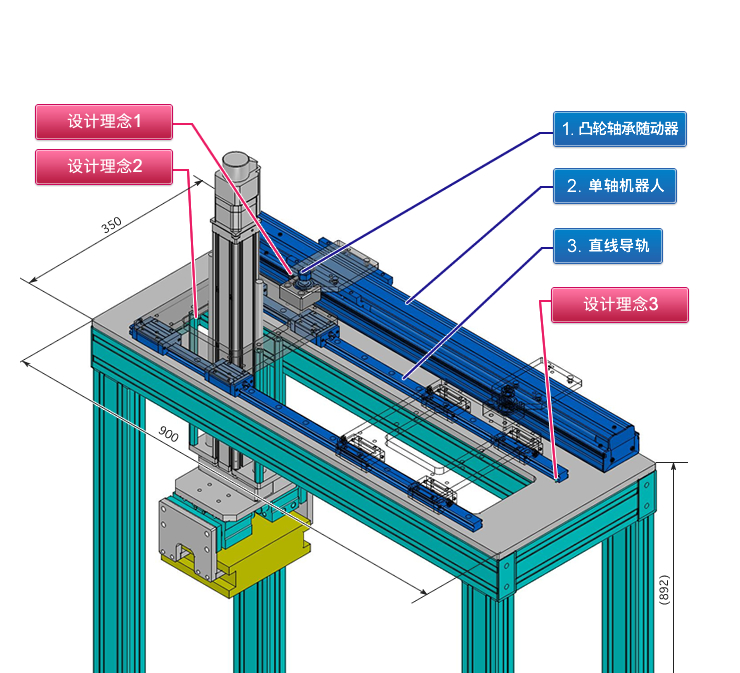

凸轮轴承随动器
下载CAD数据
在此事例中所使用的米思米型号
CFUA12-30
下载CAD数据

关于CAD数据文件格式
希望使用上述可选的3种数据格式以外的格式时,请点击下述米思米零件表中的“至该产品页”。
关于CAD文件名格式
采用以下规则命名。
| 案例库 CAD形状 | 案例库 CAD文件名 | 具体案例 (在案例No14中,单个零件编号为CFUA12-30时) |
|---|---|---|
| 装置总成 | 案例No_CAD形状 | No0014_ASSY |
| 单个零件 | 案例No_CAD形状_米思米型号 | No0014_PARTS_CFUA12-30 |
关于SolidWorks的宏文件
扩展名.swb是SolidWorks用的宏文件。
读入宏文件时,可采用以下步骤。
- 利用工具、执行宏的命令打开扩展名为.swb(Solidworks Visual basic Program)的文件。
- 从文件对话框选择.swb文件。(Solidworks Visual Basic Program)
- 要求指定SolidWorks文件的保存地址时,指定保存地址。
- 自动生成模式。
![]()
![]()
选型依据
最适合作为单向自由的动力传递零件
可选的尺寸
■凸轮轴承随动器(带内六角孔型、圆弧型)
| 用途 | 主体 | 螺帽 | |||
|---|---|---|---|---|---|
| 材质 | 密封圈 | 材质 | 表面处理 | ||
| 无 | 有 | ||||
| 普通型 | SUJ2 | ○ | ○ | S45C | 四氧化三铁保护膜 |
| 相当于SUS440C | ○ | ○ | SUS304 | - | |
| 低尘 | - | ○ | |||
| 重载 | SUJ2 | - | ○ | S45C | 四氧化三铁保护膜 |
| 双头螺栓直径 | 螺纹 | 外圈直径 | 外圈宽度 | 全长 |
|---|---|---|---|---|
| φ8 | M8x1.25 | φ19 | 11 | 32 |
| φ10 | M10x1.25 | φ22 | 12 | 36 |
| φ26 | ||||
| φ12 | M12x1.5 | φ30 | 14 | 40 |
| φ32 | ||||
| φ16 | M16x1.5 | φ35 | 18 | 52 |
精度信息
■凸轮轴承随动器的精度
- 双头螺栓直径公差: h7
- 外圈直径公差: 0/-0.05
- 外圈宽度公差: 0/-0.12
速度·负载(负载信息)
■凸轮轴承随动器参考数据
| 双头螺栓直径 -外圈直径 |
普通型 | |||||
|---|---|---|---|---|---|---|
| 基本额定动负载C(kN) | 基本额定静负载Cor(kN) | 最大容许负载(kN) | 轨道负载容量(圆弧型)(kN) | 极限转速(rpm) | ||
| 有粘胶型 | 无密封圈 | |||||
| 8-19 | 4.17 | 4.65 | 4.73 | 1.37 | 14000 | 20000 |
| 10-22 | 5.33 | 6.78 | 5.81 | 1.67 | 11900 | 17000 |
| 10-26 | 2.06 | |||||
| 12-30 | 7.87 | 9.79 | 9.37 | 2.45 | 9800 | 14000 |
| 12-32 | 2.74 | |||||
| 16-35 | 12.00 | 18.30 | 17.30 | 3.14 | 7000 | 10000 |
| 双头螺栓直径 -外圈直径 |
重载 | ||||
|---|---|---|---|---|---|
| 基本额定动负载C(kN) | 基本额定静负载Cor(kN) | 最大容许负载(kN) | 轨道负载容量(圆弧型)(kN) | 极限转速(rpm) | |
| 有粘胶型 | |||||
| 8-19 | 8.13 | 11.20 | 4.73 | 1.37 | 3480 |
| 10-22 | 9.42 | 14.30 | 5.81 | 1.67 | 2880 |
| 10-26 | 2.06 | ||||
| 12-30 | 13.40 | 19.80 | 9.37 | 2.45 | 2320 |
| 12-32 | 2.74 | ||||
| 16-35 | 20.60 | 37.60 | 17.30 | 3.14 | 1800 |

单轴机器人
下载CAD数据
在此事例中所使用的米思米型号
RSH310-C21A-N-F1-3-500
下载CAD数据
关于CAD数据文件格式
希望使用上述可选的3种数据格式以外的格式时,请点击下述米思米零件表中的“至该产品页”。
关于CAD文件名格式
采用以下规则命名。
| 案例库 CAD形状 | 案例库 CAD文件名 | 具体案例 (在案例No14中,单个零件编号为CFUA12-30时) |
|---|---|---|
| 装置总成 | 案例No_CAD形状 | No0014_ASSY |
| 单个零件 | 案例No_CAD形状_米思米型号 | No0014_PARTS_CFUA12-30 |
关于SolidWorks的宏文件
扩展名.swb是SolidWorks用的宏文件。
读入宏文件时,可采用以下步骤。
- 利用工具、执行宏的命令打开扩展名为.swb(Solidworks Visual basic Program)的文件。
- 从文件对话框选择.swb文件。(Solidworks Visual Basic Program)
- 要求指定SolidWorks文件的保存地址时,指定保存地址。
- 自动生成模式。
![]()
![]()
选型依据
需要加减速、停止精度
可选的尺寸
■单轴机器人(RSH3、滑块型)
■普通规格
| 滚珠丝杠 | 马达 | 位置检测器 | 使用环境温度、湿度 | 控制器输入电源 |
|---|---|---|---|---|
| φ15 (C7压轧) |
AC伺服马达 100W |
旋转编码器 | 0〜40℃・35〜85%RH (不得结露) |
AC100-115V AC200-230V |
■基本规格
| 导程 (mm) |
行程 (mm) |
|---|---|
| 5 | 150-1050 (50齿跳齿) |
| 10 | |
| 20 |
■尺寸、重量
| 尺寸、重量 | 行程 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | |
| 全长 | 518 | 568 | 618 | 668 | 718 | 768 | 818 | 868 | 918 | 968 |
| 重量(kg) | 4.7 | 5 | 5.3 | 5.6 | 5.9 | 6.2 | 6.6 | 6.9 | 7.2 | 7.5 |
| 尺寸、重量 | 行程 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | |
| 尺寸、重量 | 1018 | 1068 | 1118 | 1168 | 1218 | 1268 | 1318 | 1368 | 1418 |
| 尺寸、重量 | 7.8 | 8.1 | 8.4 | 8.7 | 9 | 9.3 | 9.7 | 10 | 10.3 |
选型步骤
■单轴机器人的选型步骤
可搬質量
↓
行程
↓
循环时间或最高速度
↓
确认详情
精度信息
■单轴机器人的精度
重复定位精度: ±0.01
速度·负载(负载信息)
■基本规格
| 导程 (mm) |
最大传送物重量 | 额定推力 (N) |
最高速度 (mm/sec) |
额定值 移动寿命 |
|---|---|---|---|---|
| 水平(kg) | ||||
| 5 | 80 | 339 | 300-105 | 10,000km 以上 |
| 10 | 60 | 169 | 600-210 | |
| 20 | 30 | 84 | 1200-420 |
■最高速度(mm/sec)
| 导程 (mm) |
行程 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 150-600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | |
| 5 | 300 | 255 | 225 | 195 | 180 | 165 | 150 | 135 | 120 | 105 |
| 10 | 600 | 510 | 450 | 390 | 360 | 330 | 300 | 270 | 240 | 210 |
| 20 | 1200 | 1020 | 900 | 780 | 720 | 660 | 600 | 540 | 480 | 420 |
技术计算
可使用方便的选型软件。
- ■单轴机器人选型(WEB设计支持服务)
- https://www.misumi.com.cn/maker/misumi/cad/

直线导轨
下载CAD数据
在此事例中所使用的米思米型号
SX2R28-760
下载CAD数据
关于CAD数据文件格式
希望使用上述可选的3种数据格式以外的格式时,请点击下述米思米零件表中的“至该产品页”。
关于CAD文件名格式
采用以下规则命名。
| 案例库 CAD形状 | 案例库 CAD文件名 | 具体案例 (在案例No14中,单个零件编号为CFUA12-30时) |
|---|---|---|
| 装置总成 | 案例No_CAD形状 | No0014_ASSY |
| 单个零件 | 案例No_CAD形状_米思米型号 | No0014_PARTS_CFUA12-30 |
关于SolidWorks的宏文件
扩展名.swb是SolidWorks用的宏文件。
读入宏文件时,可采用以下步骤。
- 利用工具、执行宏的命令打开扩展名为.swb(Solidworks Visual basic Program)的文件。
- 从文件对话框选择.swb文件。(Solidworks Visual Basic Program)
- 要求指定SolidWorks文件的保存地址时,指定保存地址。
- 自动生成模式。
![]()
![]()
选型依据
直進精度要
风险信息
需要进行二轴平行调整
可选的尺寸
■直线导轨(重负载用·普通间隙、普通级·双滑块·标准滑块)
| 材质 | 硬度 | 总高 | 滑轨长度 |
|---|---|---|---|
| 碳素钢 (SCM等等合金钢) |
58HRC- | 24 | 160-1480 |
| 28 | 220-1960 | ||
| 33 | 220-1960 |
选型步骤
■直线导轨的选型步骤
- 决定使用条件
- (移动物体的重量、进给速度、运行模式、寿命时间)
↓
- 预选直线导轨的规格
- (根据使用条件,预选出直线导轨的负载类型、总高、导轨长度。)
↓
- 确认基本安全性
-
- ·容许负载
- ·寿命
- ·预压负载
精度信息
■预压与精度基准(重负载用·普通间隙·普通级)
(μm)
| H的尺寸容差 | ±100 | |
|---|---|---|
| H的配合误差 | 20 | |
| W2的尺寸容差 | ±100 | |
| W2的配合误差 | H24・28 | 20 |
| H33 | 30 | |
(μm)
| 滑轨长度 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| -250 | 251-400 | 401-500 | 501-630 | 631-800 | 801-1000 | 1001-1250 | 1251-1600 | 1601-2000 | |
| 移动平行度 | 7 | 12 | 14 | 18 | 21 | 23 | 25 | 27 | 28.5 |
速度·负载(负载信息)
■直线导轨的额定负载(重负载用·普通间隙·普通级)
| 总高 | 基本额定负载 | 静态容许力矩 | ||
|---|---|---|---|---|
| C(动)kN | CO(静)kN | MA・MB N・m |
Mc N・m |
|
| 24 | 8.6 | 14.2 | 69 | 98 |
| 28 | 12.5 | 21.3 | 155 | 232 |
| 33 | 20.2 | 34.5 | 275 | 393 |
技术计算
■直线导轨的寿命计算
·寿命
- 直线导轨在承受负载并进行直线往复运动时,由于重复应力经常作用于滚动体(钢珠)或滚动面(滑轨)上,因此会出现被称为材料疲劳性剥落的鳞状损伤。发生这一最初剥落之前的总移动距离被称作直线导轨的寿命。
·额定寿命
- 额定寿命是指在相同条件下,分别使一群相同的直线导轨移动时,其中90%不发生剥落而达到的总行走距离。额定寿命可根据基本动态额定负载与施加在直线导轨上的负载按下列公式求出。
实际使用直线导轨时,首先应进行负载计算。要通过计算求出直线往复运动中的负载并不容易,因为运动过程中存在振动或冲击,并且还要充分考虑振动或冲击相对于直线导轨的分布状况。另外,使用温度等也会对寿命产生很大影响。将这些条件加在一起,上述计算公式变成下式。
- L: 额定寿命(km)
- fH: 硬度系数(参见图-1)
- fT: 温度系数(参见图-2)
- fC: 接触系数(参见表-1)
- fW: 负载系数(参见表-2)
- C: 基本动额定负载(N)
- P: 作用负载(N)
·硬度系数(fH)
- 使用直线导轨时,即使是滚珠接触的轴也必须具有充分的硬度。如果达不到适当的硬度,容许负载将减小,从而缩短使用寿命。
请用硬度系数补偿额定寿命。
·温度系数(fT)
- 如果直线导轨的温度超过100℃,直线导轨与轴的硬度就会下降,容许负载会减小到低于常温使用时的负载,寿命也随之缩短。
请用温度系数补偿额定寿命。
*请在各产品页码的耐热温度范围内使用直线导轨。
- ·接触系数(fC)
- 实际使用直线导轨时,通常在1根轴上使用2个以上的直线导轨。在这种情况下,施加在各直线导轨上的负载因加工精度而异,不会成为均衡负载。其结果,每个直线导轨的容许负载会因每个轴上的直线导轨数量而异。
请用表-1的接触系数补偿额定寿命。
表-1.接触系数
1根轴上组装的直线轴承数量接触系数fc
| 1 | 1.00 |
| 2 | 0.81 |
| 3 | 0.72 |
| 4 | 0.66 |
| 5 | 0.61 |
- ·负载系数(fW)
- 计算作用于直线导轨的负载时,除了物体的重量之外,还必须正确地求出运动速度所产生的惯性力或力矩负载以及它们与时间的变化关系等。但在往复运动中,除了经常重复起动与停止之外,还要考虑到振动、冲击等因素,很难进行正确的计算。因此,可使用表-2所示的负载系数以简化寿命计算。
表-2.负载系数
| 使 用 条 件 | fw |
|---|---|
| 没有外部冲击与振动, 速度也较慢时 15m/min以下 |
1.0-1.5 |
| 没有特别明显的冲击与振动, 速度为中速时 60m/min以下 |
1.5-20 |
| 有外部冲击与振动, 速度为高速时 60m/min以上 |
2.0-3.5 |
- ·作用负载P的计算方法
- 在滑块单体上施加力矩负载时,根据以下计算公式将力矩负载换算为作用负载。
- P:作用负载(N)
- F:向下负载(N)
- Co:静态额定负载(N)
- MA:静态容许力矩上下摆动方向(N.m)
- MC:静态容许力矩滚动方向(N.m)
- Lp:上下摆动方向的负载点距离(m)
- Lr:滚动方向的负载点距离(m)



在上述案例设备示意图中,米思米零件表中刊载的产品用蓝色标示(详细介绍的主要零件为深蓝色)。
有预想的工件时用黄色标示。
特点
- 通过X-Z使用单轴机器人的料架传送示例。
- 由于是中载,因此使用双轴直线导轨。
预想的工件
- 有一些重量的工件
设计要点
- 选用单轴机器人、直线导轨时,应探讨以下条件后再决定。
- 设定使用条件
(动作速度、行程、负载、安装空间、安装姿势、使用频率、精度、工作环境、强度、寿命等) - 根据上述结果,选择单轴机器人、直线导轨、凸轮轴承随动器。
- X轴的动作会对单轴机器人施加力矩,因此应注意不要超过容许力矩。
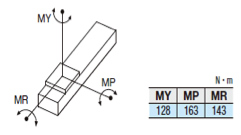
■RSH3 静态容许力矩
力矩图
- 还需要降低成本时,请同时探讨多种候选,设计最佳的机构。
- 还需要考虑活动部的安全措施。
- 本案例中将直径相同的2根气缸对象配置以进行夹持,需要定心时,应探讨变更气缸内径,以单侧为基准等。
- 像本案例一样使用了线性驱动器的搬运装置中,多在X轴的往返端、上下动作端设置开关。
- 此外,各轴均安装配线、配管保护用电缆保护链。
对于您提出的意见我们很难逐个回答。
希望回答的客户请使用咨询表。